The 8th Annual Symposium
on Robotics and Machine Intelligence
Gibble Auditorium, Master’s Center,
Session Chairs: David
Coleman and J. Wunderlich, Ph.D.
“Wunderbot IV Autonomous Robot: Vision System”
James
Painter (Computer Engineer and Computer Scientist)
The scope of this senior project in computer engineering
includes primarily the development of an effective vision system for the Wunderbot IV autonomous robot. The system will be adapted
for the challenges of the Intelligent Ground Vehicle Competition (IGVC), in
which the robot will compete in June 2008. Prior work on the robot’s vision
system included the acquisition of a DVT Legend high-resolution video camera
and development of its corresponding LabVIEW sub-VIs used to acquire a TCP/IP communication string from DVT’s proprietary image processing software (Intellect). In
order for the robot to outperform the rest of the field at the IGVC, it will
require intelligent image processing methods that integrate with adaptable
motion-control algorithms. It will also transmit path-detection information to
the robot’s path-planning code in order to map the traversed course. The Hough
Transform for straight-line detection will be explored in order to seek a path
between two white lines parsed from the robot’s vision. Additional,
indirectly-related but necessary tasks for the project include the development
of a closed-loop motor control system for accurate robot motion response
(incorporation of optical encoders) and responsibility for writing/debugging LabVIEW code to synchronize all hardware subsystems. THERE IS ALSO A POSTER
ASSO
“O3:
An Optimal and Opportunistic Path Planner (with Obstacle Avoidance) using Voronoi Polygons”
David
Coleman (Computer Engineer)
This is a senior project for Computer Engineering.
Traditional mobile robot research focuses on a robot navigating its environment
to reach a single goal while avoiding obstacles. This research proposes a
new method called O3 to solve the challenges presented at the
Intelligent Ground Vehicle Competition (IGVC) where a navigation course
includes multiple goals to be found in an optimal order. The O3 technique
includes improvements on traditional path planning and obstacle avoidance
techniques while providing an explicit ability to change course as obstacles
are discovered. This method uses modern trajectories such as
minimum-weighted Hamiltonian circuits, A* algorithm for obstacle avoidance, and
local points of opportunity to update the globally optimal path using Voronoi polygons. Environmental mapping is also used
to speed up the search algorithms in static environments. Overall, the O3
technique exploits local points of opportunity while avoiding obstacles and
ultimately finding a globally optimal path through an unknown
environment. Future research involving this methodology will be
implemented on an autonomous web-based tour guide robot to serve the Internet
community reviewing
“Wunderbot IV Autonomous Robot: Joint
Architecture for Unmanned Systems”
Jeremy
Crouse (Computer Engineer)
This is a senior project for Computer Engineering. To
prepare for our Intelligent Ground Vehicle Competition, our team must make
changes to the current system. In an effort to make future
implementations easier, we are rewriting the program that runs Wunderbot. It is my responsibility to program the
Joint Architecture for Unmanned Systems protocol used by the Department of
Defense, which will be used as a challenge in the upcoming competition. The
JAUS protocol is a universal command language that all robots under the DoD use. This standardized
language allows vendors to keep up with current technology and ensure that
older versions of robots will be able to efficiently communicate with newer
ones. This protocol was developed in order to remove human interaction from
dangerous and harmful conditions in the surrounding environment. To have JAUS
ready for competition and pass the challenge, I need to program three different
commands, implement them in the Wunderbot, be able to
receive the commands through wireless communication, and have the commands
carried out. Presently, JAUS is coded for a wired connection; however, I
will convert it and allow it to be received wirelessly. THERE IS ALSO A POSTER
ASSO
“Robotics & Machine Intelligence Club (Wunderbot IV and V)”
James Painter (CENGR,CS), David Coleman (CENGR), Jeremy Crouse
(CENGR),
Chris Yorgey
(ENGR-EE), Dan Fenton (CENGR), Mike Patrick(CENGR)
The student RMI club (Robotics and Machine
Intelligence) has designed and constructed a fully-autonomous 300 pound mobile
robot in 2008 to again compete this year for the third time in the four-day
International Ground Vehicle Competition (IGVC) against approximately
40 schools (mostly top National and International Research
institutions). This is the fifth incarnation of the robot over the past
nine years. The robot will compete this summer in seven areas, three
of which -- visual display of the project, a technical report, and an oral
presentation deal with engineering design. In addition, there are four
events: (1) Qualifying, which involves avoiding obstacles, seeing white lines
spray-painted in grass, climbing ramps, emergency stopping, etc.; (2)
Navigating a GPS course full of obstacles; (3) Navigating a long maze defined
by pairs of white lines spray-painted in grass -- and riddled with barrels,
fences, ramps, trees, and possibly surprise obstacles; and (4) Responding
wirelessly to several packetized commands. The robot
employs sophisticated mathematical path-planning and obstacle avoidance (by David Coleman), complex image
processing (by James Painter),
wireless packetized communication (by Jeremy Crouse), Laser Range Finding (by Chris Yorgey), GPS positioning, a digital compass,
and sophisticated systems integration. The robot is planned to become a virtual
touring robot and environmental sample-collecting robot in 2009 (by Mike Patrick and Dan Fenton), and
will employ a robotic arm. THERE IS ALSO A POSTER
ASSOCIATED WITH THIS TALK – displayed in the 2nd floor atrium area
of the Master’s Center from
“Outstanding projects by
students in CS/EGR 434 Artificial Intelligence and Robotics”
Kim
Greenwald (Computer Scientist), Michael
Patrick (Computer Engineer)
For the course CS/EGR 434
"Artificial Intelligence and Robotics," four 1/2-semester projects
were selected by Dr. Wunderlich as outstanding
projects. Michael Patrick designed and programmed an "Expert
System" employing over 160 variables to predict the winner of a football
game. The system uses data gathered to predict the winner
using Artificial Intelligence algorithms and customized
programming. When compared to ESPN’s experts and simulator, the results
are strikingly similar. Kimberly Greenwald designed and programmed an AI "Expert System" for choosing a major
in college; this system collects personal input from a user, compares
the input against a set of rules, and then outputs a list of possible college
majors that might match that type of person. Michael Patrick
designed a robotic arm for use on the Wunderbot to
collect and analyze environmental samples around campus.;
this project includes the basic design choices and possible plans for future
implementation. Kimberly Greenwald derived the mathematical kinematics
for a three degree of freedom robotic arm in a two dimensional plane; the
derivation was then used to design and program a simulator to experiment
with how the robotic arm might move between different points in
space. THERE IS ALSO A POSTER
ASSOCIATED WITH THIS TALK – displayed in the 2nd floor atrium area
of the Master’s Center from
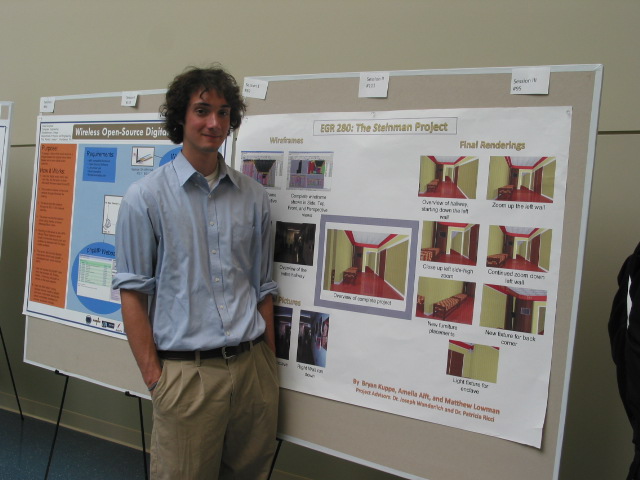
“3-D Rendering of Robotics and Machine
Intelligence Laboratory”
Bryan
Kuppe (Future Architect, Japanese Linguist)
This research began in First Year Seminar "Conceptual
Architecture; From Habitats to Humanoids" and continued as a series of Architecturally independent studies. This talk is focused on
3-D computer renderings of the new Robotics and Machine Intelligence Laboratory
scheduled to open in the Fall of 2008. Renderings were
created on Rhinoceros 4.0 and Flamingo 1.1, two programs used for NURBS(Non Uniform Rational B-Splines)
modeling and 3-D rendering. A combination of constructing a wireframe
of the actual product/structures in the project (with Rhinoceros 4.0), and
applying materials to surfaces/objects, as well as shadowing, texture, and lighting,
to create a realistic depiction of the desired product (Flamingo 1.1) will be
shown and discussed. THERE ARE ALSO TWO POSTERS (see: here
and here)
ASSOCIATED WITH THIS TALK displayed in
both the
Past, Present, and Future
Elizabethtown College Robotics and Machine Intelligence
Wunderbot Team
Related Poster
session for all of the above talks
(Displayed in the 2nd
floor atrium area of the Master’s Center)
Also Displayed in this area will be Posters
for other Senior Projects Supervised by Dr. Wunderlich:
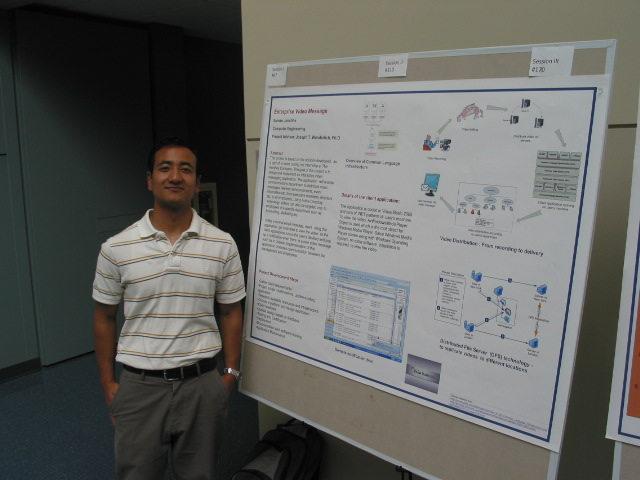
Suman Jonchhe: “Enterprise Video Message”
Andrew
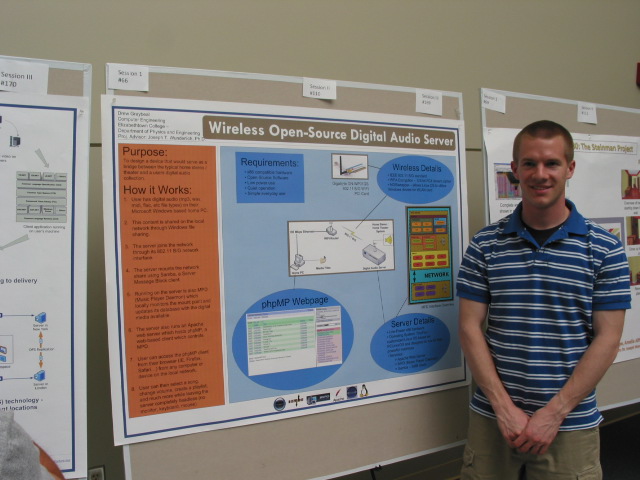
Graybeal“Wireless Open-source Digital Audio Server”
Amanda
Carrow & Chris Weaver “Unlock a Door with a Cell
Phone”
This
is an annual event of the Elizabethtown College
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}