The 9th Annual Symposium
on
Robotics and Machine Intelligence
Gibble Auditorium, Master’s
Center, Elizabethtown College, Elizabethtown, PA, USA
Session
Chairs: Nick Diaduk and J. Wunderlich,
Ph.D.
TALKS:
|
|
3-D Rendering of Space Station Enhancements |
# 127 |
|
|
Bryan Kuppe |
|
|
This research began in the First
Year Seminar "Conceptual Architecture; From Habitats to Humanoids"
and continued as a series of independent studies leading to designs including
3-D computer renderings of the new Robotics and Machine Intelligence Lab,
renovations to the Steinman Building lobby, drawings of the existing Thompson
Gymnasium, and most recently renderings of the existing Space Station
orbiting earth -- with suggested enhancements. A combination of constructing
wireframes (with Rhinoceros 4.0), and applying materials to surfaces/objects,
as well as shadowing, texture, and lighting (with Flamingo 1.1) will be
shown. See TALK |
||
|
|
Analysis of past |
# 128 |
|
|
Daniel Fenton, Mike Patrick |
|
|
The Elizabethtown College “Wunderbot” mobile robots have evolved over six
generations starting in 2000 with “MultEbot 1” ("Wunderbot
0") and “MultEbot 2” in 2002 (renamed “Wunderbot
1” by the students). Three of these robots have been entered into
international competition against approximately 40 Universities and Colleges
at each event. This talk will analyze selected competitors as part of
preparations for entering Wunderbot 5 into competition in 2010. See TALK
and 2008
IGVC REPORT |
||
|
|
Design Goals for Wunderbots 5 and 6 |
# 129 |
|
|
Chris Ramos, Mike Patrick, Michael Conlow, Than Aung, Joseph Wunderlich |
|
|
The Elizabethtown College “Wunderbot” mobile robots have evolved over six
generations starting in 2000 with “MultEbot 1” ("Wunderbot
0") and “MultEbot 2” in 2002 (renamed “Wunderbot
1” by the students). This talk will discuss the capabilities planned for Wunderbot 5
in 2010 and Wunderbot
6 in 2011. See TALK1
and TALK2 |
||
|
|
Automated Shower Preheating System using a PLC |
# 130 |
|
|
Matt Drob,
Brittany Bolling, Joe Macus
|
|
|
The goal of this half-semester
project for CS/EGR333
“Digital
Design and Interfacing” was to create a new idea using Phoenix Contact‘s new Nano line of Programmable Logic Controller (PLC) which
includes new flow-chart graphical programming. Several preliminary designs
were simulated and will be discussed. The final system selected for
implementation, an “Automated Shower Preheating System” will be demonstrated on stage. See TALK
and PICTURE
|
||
|
|
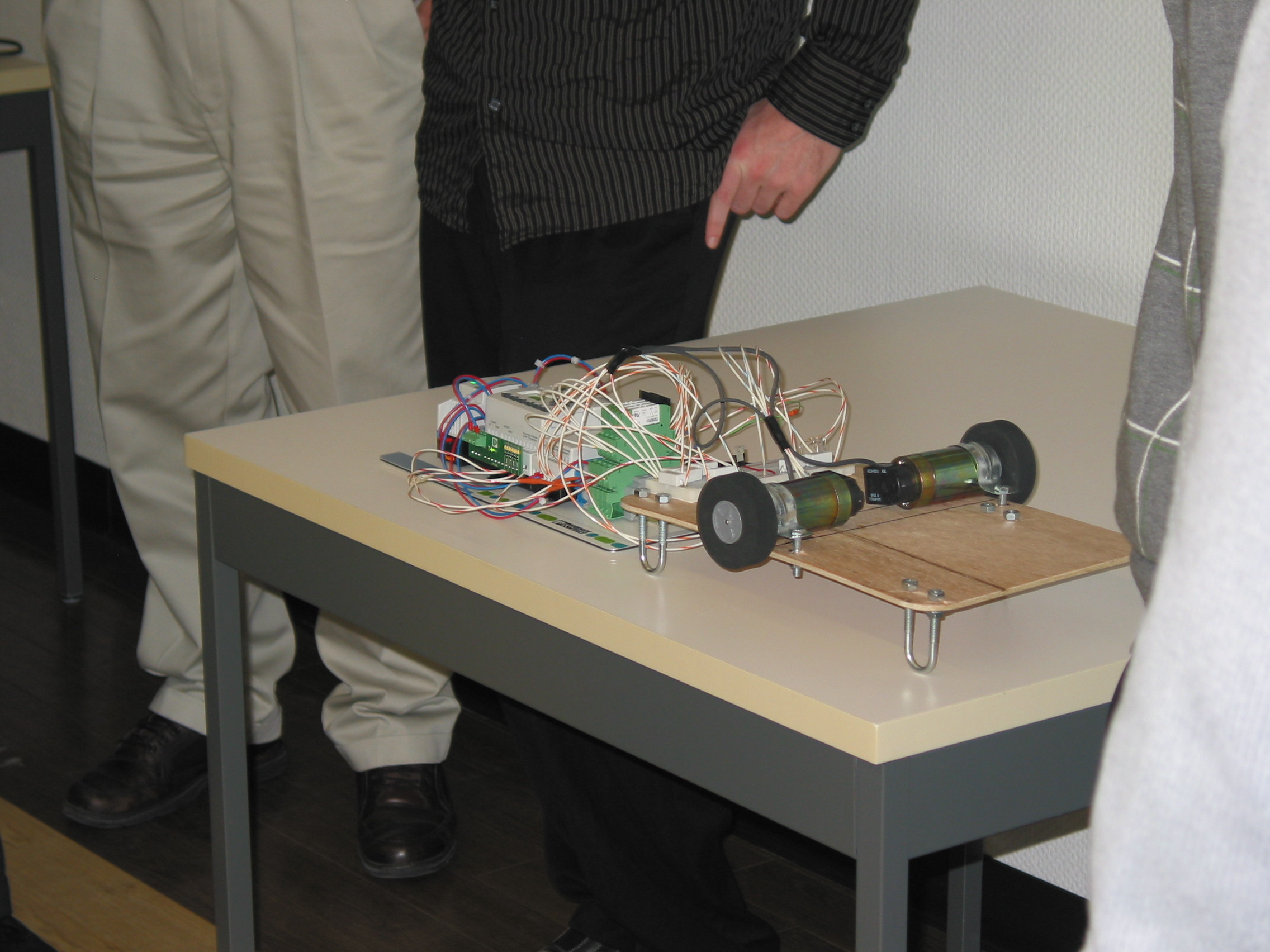
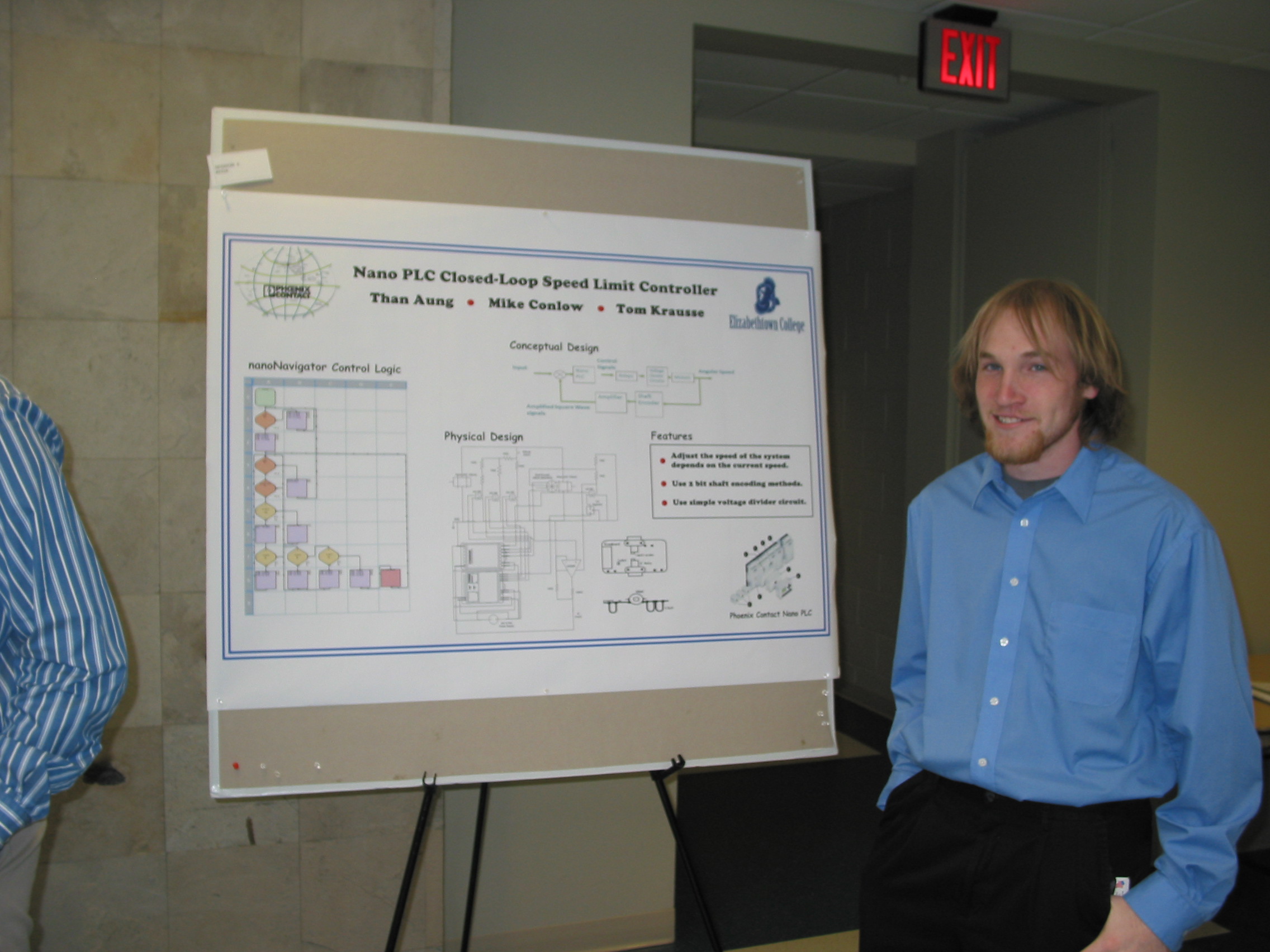
Closed-loop Motor Controller using a PLC; with Potential Application to a Monorail |
# 131 |
|
|
Than Aung,
Michael Conlow, Thomas Krausse
|
|
|
The goal of this half-semester
project for CS/EGR333
“Digital
Design and Interfacing” project was to create a new idea using Phoenix Contact‘s new Nano line of Programmable Logic Controller (PLC) which
includes new flow-chart graphical programming. Several preliminary designs
were simulated and will be discussed. The final system selected for
implementation, a “Closed-loop Motor Controller with Potential Application to
a Monorail” will be demonstrated on stage. See TALK
and PICTURE |
||
|
|
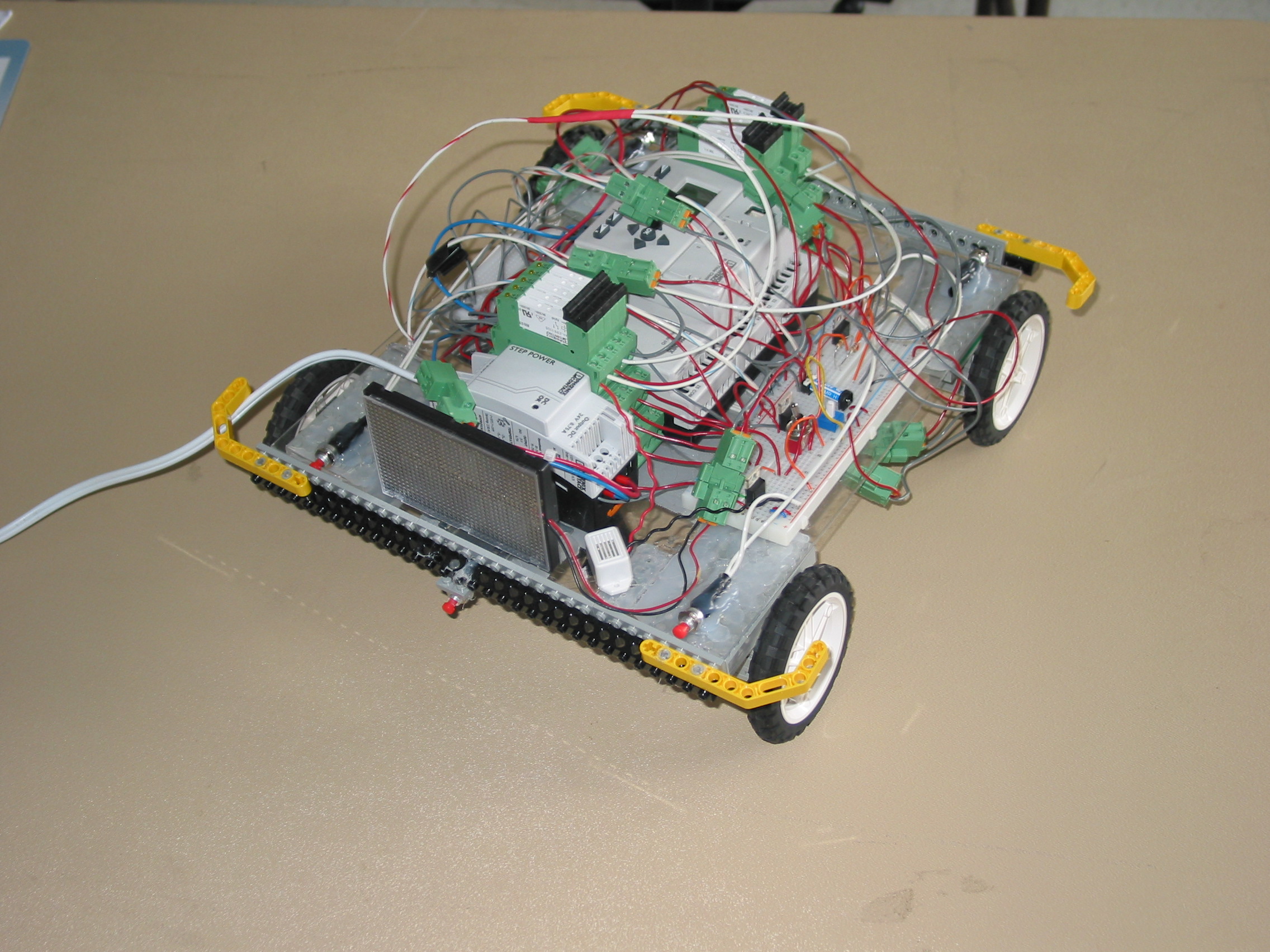
A New Obstacle-Avoiding,
Light-Seeking |
# 132 |
|
|
Mike Patrick, Tim Stepp,
Chris Ramos |
|
|
The goal of this half-semester
project for CS/EGR333
“Digital
Design and Interfacing” project was to create a
“new” idea using Phoenix Contact’s new Nano line of
Programmable Logic Controller (PLC) which includes new flow-chart graphical
programming. Several preliminary designs were simulated and will be
discussed. The final system selected for implementation, a
”New Obstacle-Avoiding, Light-Seeking Mobile Robot” will be
demonstrated on stage. See
TALK
and PICTURE |
||
|
|
Conceptual Design of a Space-Exploration Robot, Space Craft, or AI-containing Computer System |
# 133a |
|
|
Kevin Christie, Michael Fleming, Todd Lewellen, Kamron Malik, Christine Miller, Craig Rixham,
David Tileston |
|
|
The goal of this semester project
for CS/EGR230
“Microcomputer
Architecture” was for each student to create a conceptual design of a
space-exploration related robot, space craft, or AI-containing computer
system for space exploration. All student designs will be listed, followed by
a talk on one selected concept. See TALK |
||
|
|
Digital Motor Controller for Electric Car |
# 133b |
|
|
Nick Diaduk |
|
|
This project was completed in
fulfillment of an “Honors Thesis” and EGR494
“Senior
Project in Computer Engineering” The advancement of consumer
accessible microcontrollers has lead to the availability of some very
powerful and flexible chips for the general consumer industry. This project
capitalizes on these new capabilities by designing a control system for an
electric car with implications that would not only take advantage of these
new powerful capabilities, but provide for a cost effective product to the
moderately mechanically talented public with the wish to dramatically save in
fuel costs and potentially benefit the environment. This project aimed to
design and implement a motor controller for a nine inch advanced DC electric
motor with the smallest possible feature set. The requirements for this
design were to be cost effective, reliable, and easy to install and maintain.
An embedded platform was chosen based upon cost effectiveness, ease of
development, and reliability. The design is be
compared to an industry standard Curtis analog motor controller. Proof of
concept is in the form of a full size electric car designed from a 1986
Toyota MR2. The conversion cost is approximately $6000 and includes
everything needed to make the car street legal. This conversion does not
recover auxiliary systems powered from the gasoline engine. The end result
will be a marketable microcontroller based digital motor controller with
proof of concept and estimated project difficulty and impact for a moderately
mechanically inclined individual. |
||
POSTERS:
|
Automation Applications for |
# 233 |
||
|
Jeremy Cain, Matt Drob,
Brittany Bolling, Joe Macus,
Than Aung, Michael Conlow,
Thomas Krausse, Mike Patrick, Tim Stepp, Chris Ramos |
|
|
|
|
The goal of these half-semester projects for CS/EGR333
“Digital
Design and Interfacing” was to create new ideas using Phoenix Contact‘s new Nano line of Programmable Logic Controller (PLC) which
includes new flow-chart graphical programming. 42 preliminary concepts were
considered, 9 simulated, and 3 built and tested. See POSTER_A,
POSTER_B,
POSTER_C |
|||
|
3-D Computer Renderings of Space Station Enhancements |
# 234 |
||
|
Bryan Kuppe |
|
|
|
|
This research began in the First
Year Seminar "Conceptual Architecture; From Habitats to Humanoids"
and continued as a series of EGR280 independent studies leading to designs
including 3-D computer renderings of the new Robotics and Machine
Intelligence Lab, renovations to the Steinman Building lobby, drawings of
exiting the Thompson Gymnasium, and most recently renderings of the existing
Space Station orbiting earth -- with suggested enhancements. A combination of
constructing wireframes (with Rhinoceros 4.0), and applying materials to
surfaces/objects, as well as shadowing, texture, and lighting (with Flamingo
1.1) will be shown. See POSTER
|
|||
|
3-D Free-hand Renderings of Wall-E, Wunderbot4, and Mars Rover |
# 235 |
||
|
Eric Peifer |
|
|
|
|
This student‘s artistic works began First
Year Seminar "Conceptual Architecture; From Habitats to Humanoids." Since then Eric has created many
works of art for the Fine and Performing Arts Department. As a senior, Eric
agreed to create a series of sketches relating to robotics. See POSTER |
|||
This is an annual event of the
Robotics and Machine Intelligence Lab: http://users.etown.edu/w/wunderjt/weblab.htm
To see
all student projects over the past 10 years, go to: http://users.etown.edu/w/wunderjt/Weblab_archive.htm
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}